




手 机:15112316407
Q Q:272794434
网 址:www.007her.com
地 址:广东省东莞市大岭山镇农村工业路22号101室

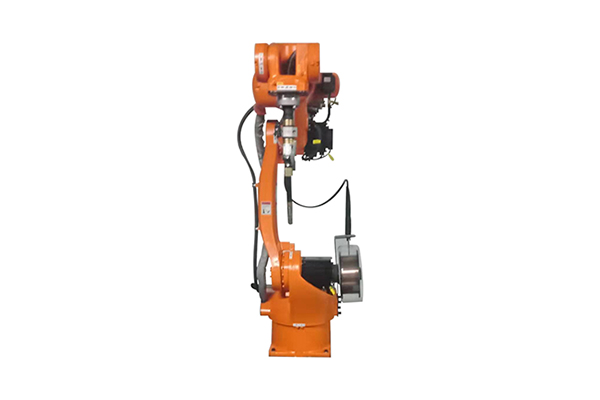
供应机器人焊接时应先调度电极杆的方位,使电极刚好压到焊件时,电极臂坚持相互平行。通电后电源指示灯应亮,电极压力巨细可调整弹簧压力螺母,改动其紧缩程度而取得。在结束上述调整后,可先接通冷却水后再接通电源预备焊接。机器人批发装置时,应根据出产特色,精确调整机身施焊部位与地上的间隔,因为点焊机工作中,需求焊工常常送、取焊件,恰当的焊.接方位,能够前进焊工的出产功率。为便于安全操作设备,在焊机的邻近应装设安全型堵截开关或恰当容量的供电断路器。

供应机器人接通电源后,先使焊件两端面在夹具移动下,轻微触摸构成许多具有很大电阻和高电流密度的触点,所承受的压力简直为零,发生很大的热量,瞬间烧化而构成衔接焊件两端面的液态金属过梁。金属液体过梁上效果着电磁力,径向紧缩效应力及外表分子张力,过梁内部同它的外表之间构成巨大的压力差和温度差,在电流加热效果下,过梁液体迅速胀大爆破构成亮光。机器人批发亮光进程便是液体过梁不断构成和爆破进程。亮光效果:加热了焊件。烧掉了焊件端面脏物和不平物质。
1.机器人批发打开给水阀,承认冷却水的流通状况良好。2.控制设备的动作选择开关设在“动作实验”侧,使加压头边动作边调整。用减压阀调整压缩空气,使电极加压力习惯被焊物的厚度。3.控制设备的动作选择开关设在“电极调整”侧,踩住脚踏开关,使电极下降,通过推拉加压头限位销调整电极行程。4.调整电极尺寸,使上下电极臂座间的间隔位于230-240mm。5.因工艺需要,电极伸长300mm时,气压调节最大值<≤0. 3Mpa,避免电极发生永久变形。6.供应机器人焊接完,切断冷却水,将气压调节器彻底排净,关电源。

机器人批发微点焊头:微点焊头为微电子点焊机对应的焊头,它的特色主要是焊头和焊机现已形成回路,电流经过这个回路,主要在焊头的发生热量,焊头自动发热,而被焊接物体不自动发热,焊头触摸被焊物体,瞬间将热量传递给被焊接物体,将被焊接物体融解并焊接在另一个触摸的被焊接物体上。供应机器人点焊头挑选首要依据焊线资料和焊盘资料的熔点挑选点焊头资料和点焊头类型.依据焊点要求,挑选点焊头放电部分与焊件触摸的面积。大焊线需求大的触摸面积.依据焊线资料和焊接资料挑选放电部分形状。

供应机器人是依据电容储能迅速放电,输出大电流来完成焊接。因为电容储能瞬间放电输出大电流的特点,焊接工件外表痕迹很小,产品美观。机器人批发采用电容贮存能量而在瞬间释放出大电流,对电网冲击小;因为焊接时间短、中频点焊机电流大,使得因为焊接过程所发生的热量引起工件过热氧化和变形等状况减少至最小;焊接压力可以经过压簧调整设定;能焊接铁金属、不锈钢,也能焊接银、铜、铝等难焊金属以及非相同金属之焊接。
手机:15112316407(蒋生)
电话:13923782005(何生)
邮箱:272794434@qq.com
地址:广东省东莞市大岭山镇农场工业路22号101室

微信号
